
Podsumowanie 2018 roku
W tym poście postaram się przedstawić Tobie, myślę że tę ciekawszą część rzeczy, którymi się zajmowałem w tym roku. Opowiem o tym co robiłem odnośnie

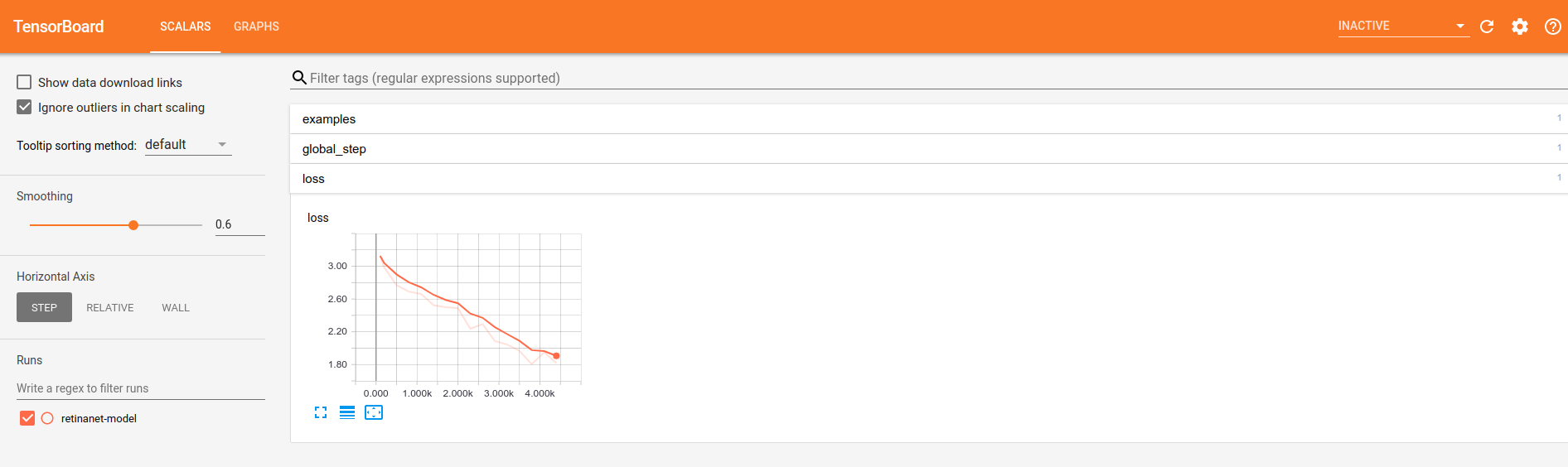
Wykrywanie obiektów w Google Cloud ML Engine
W tym poście dowiesz się jak wdrożyć model TensorFlow do wykrywania obiektów w Google Cloud ML Engine! Pokażę jak odpowiednio przygotować model, jak utworzyć nowy
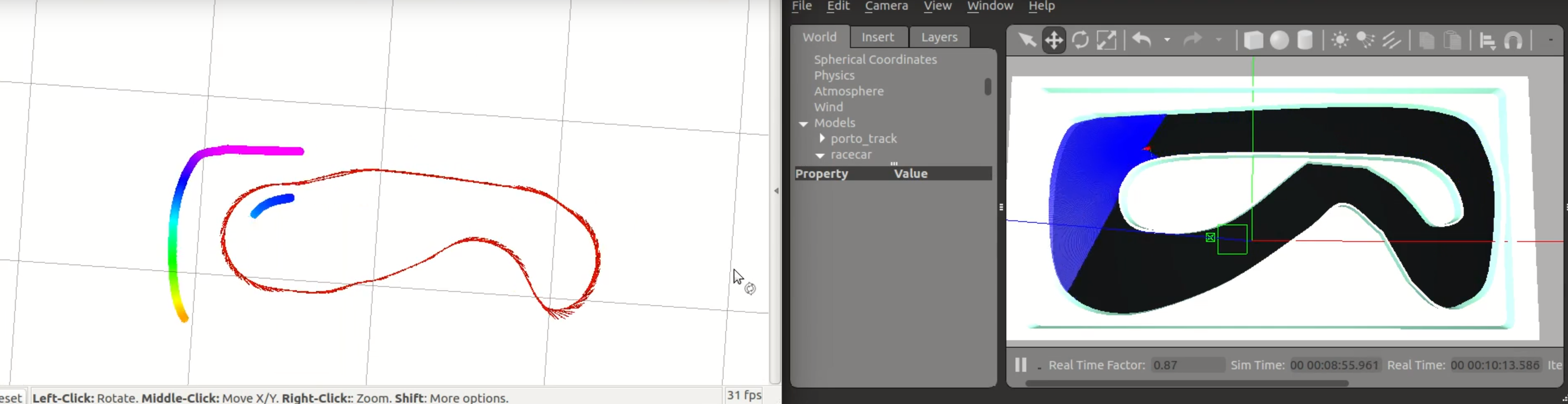
Jak uruchomić symulator F1/10 w Gazebo ROS
W tym poście dowiesz się jak zainstalować i uruchomić symulator F1tenth w Gazebo ROS. Pokażę Ci jak uruchomić symulator wraz z kodem, który jeździ po torze!

WSDC 2 – Drugi Meetup Warsaw Self-Driving Cars
15 października odbyło się drugie spotkanie grupy Warsaw Self-Driving Cars. W ramach tego wydarzenia rozmawialiśmy o zawodach samochodów autonomicznych 1:10 oraz 1:1 na torze, a także
Pierwsze kroki z TPU
W tym poście pokażę Ci jak uruchomić pierwszy kod na TPU. Zaczynam od utworzenia TPU oraz serwera w Google Cloud, przygotowuję go do wykrywania obiektów, a

Dostałem 105 TPU z Tensorflow Research Cloud!
Tensorflow Research Cloud rozdaje dostęp do 1000 procesorów tensorowych TPU dla najlepszych naukowców na świecie. Dostałem 105 TPU z tej puli na 30dni.