Nauczę Cię jak budować
głębokie sieci neuronowe do klasyfikacji obrazu
nawet jeśli nie znasz bibliotek TensorFlow, Keras i PyTorch!
Program Szkoleniowy Klasyfikacja Obrazu to jedyny w Polsce, tak rozbudowany i kompleksowy program o tworzeniu i trenowaniu głębokich sieci neuronowych do rozpoznawania obrazu, poparty ponad pięcioletnim doświadczeniem w budowaniu architektur oraz trenowaniu modeli do różnych zadań związanych z widzeniem maszynowym.
Sprzedaż zakończy się za
we wtorek 28.02.2023 o 22:00
Sprzedaż zamknięta
Ponad 5 lat doświadczenia w Deep Learningu
Od bibliotek takich jak DIGITS, Theano, Keras czy Darknet poprzez TensorFlow 1, aż do TensorFlow 2 i PyTorcha.
Ponad 20 godzin lekcji i ponad 10 godzin materiałów dodatkowych
to nagrania lekcji w których wyjaśniam koncepty, sposób działania głębokich sieci neuronowych, a także nagrania ze spotkań na żywo, w których pracujemy nad zgłaszanymi problemami.
100 jupyter notebooków, które uruchomisz u siebie!
Do lekcji otrzymasz przykłady kodu – implementacje treningów w TensorFlow i PyTorchu, które pozwolą Ci wygodniej pracować i lepiej zrozumieć zagadnienia w praktyce. Jest to też doskonałe źródło do przeniesienia wiedzy do własnych projektów!
12 kompleksowych modułów
które przeprowadzą Cię poprzez podstawy budowania sieci neuronowych na przykładach. Droga od prostych problemów, dla małych zdjęć, po duże zdjęcia, poprawę wyników, analizę działania czy wdrażanie modeli.
Proces i przykłady, które uruchomisz także u siebie
Przykłady kodu w notebookach do uruchomienia lokalnie lub w Google Colab. Co ważniejsze nauczę Cię procesu, który zmniejszy liczbę błędów, które możesz popełnić.
Ten program jest dla Ciebie, jeśli:
- Chcesz opanować podstawy Deep Learningu
- Chcesz zastosować sieci we własnych aplikacjach
- Potrzebujesz prostych przykładów, które pozwolą Ci wystartować
- Masz już za sobą darmowe kursy, ale wciąż nie trenujesz sieci
- Także jeśli znasz już podstawy, a chcesz działać w praktyce
- Implementujesz sieci w Matlabie a chcesz usiąść do TensorFlow/Keras, bądź PyTorcha
- Chcesz zacząć przygodę z głębokimi sieciami do widzenia maszynowego
Kim jest Twój instruktor?

Dr inż. Karol Majek
to były mentor programu Udacity Self-Driving Car Nanodegree
obecnie prowadzi firmę Cufix zajmującą się szkoleniami i konsultacjami z wykorzystania głębokiego uczenia do analizy obrazu.
Brał udział w licznych zawodach robotów i pojazdów autonomicznych ELROB, DARPA VRC, Enrich, Self-Racing Cars, F1/10.
Prowadzi bloga DeepDrive.pl o głębokich sieciach neuronowych, samochodach autonomicznych i robotyce.
Budowanie modeli do analizy obrazu to skomplikowany proces,
który stanie się dla Ciebie prosty i jasny dzięki temu programowi!
W czym pomoże Ci ten program szkoleniowy?
Przykłady kodu, które uruchomisz w Google Colab, lub na własnym komputerze w Jupyter Notebooku. Otrzymasz 100 notebooków!
Jak skonfigurować środowisko pracy? Jak zainstalować potrzebne biblioteki w taki sposób by uniknąć najczęstszych problemów. Krok po kroku instalacja TensorFlow i PyTorcha wraz ze wsparciem GPU.
Pracuj niezależnie od swojego komputera. Wybierz natywną instalację na swoim systemie operacyjnym iOS, Windows, Linux, albo skorzystaj z hostowanych usług jak np. Google Colab i pracuj z przeglądarki na maszynach wyposażonych w karty graficzne.
Zadania do własnoręcznej realizacji, bo uczenie się w praktyce ma wielkie znaczenie, by później móc rozwiązywać problemy samodzielnie.
Bez przywiązania do przedstawionych podejść, żadnych specjalnych frameworków, nic czego później nie wykorzystasz. Ten program dostarczy Tobie uniwersalnych rozwiązań i w żaden sposób Cię nie uzależni od dodatkowych bibliotek.
11 prac domowych które tworzą mini projekty – możesz się nimi pochwalić na Githubie! Największym zwycięstwem będą zdobyte umiejętności oraz intuicja w pracy z sieciami. Zdobędziesz praktyczne doświadczenie w pracy nad uzyskiwaniem i poprawą wyników predykcji sieci do klasyfikacji obrazu.
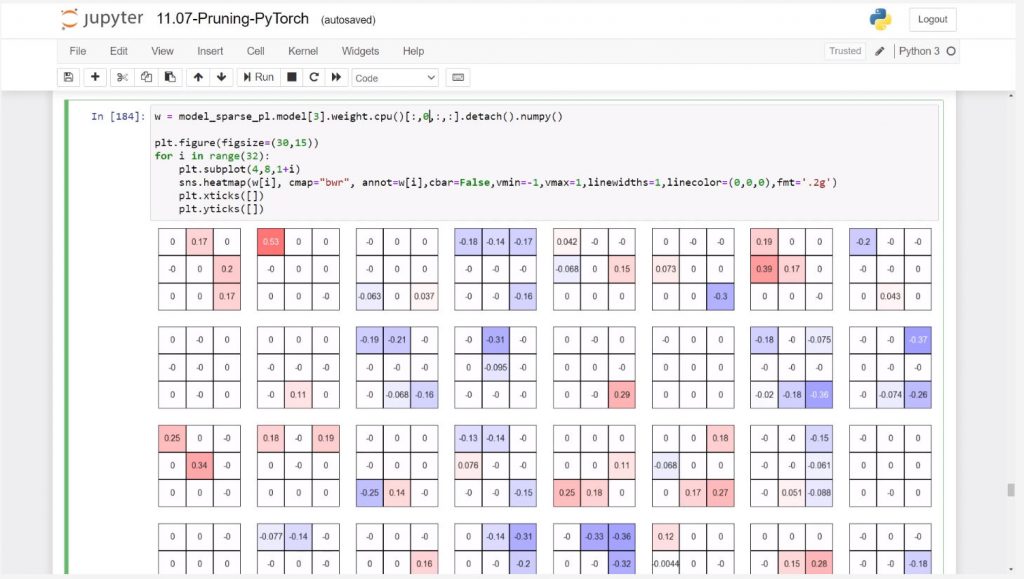
Kod wraz z wizualizacjami danych, logów treningów czy metryk. Potrzebujesz wizualizować by lepiej rozumieć co się dzieje, zarówno w danych, w treningu jak i w końcowym modelu.
Czego potrzebujesz, z czego warto korzystać, jakie narzędzia przydadzą Ci się na co dzień. Biblioteki do data augmentation pozwolą Ci poszerzyć swój zbiór danych. W programie nauczysz się jak możesz z nich korzystać.
Baza zbiorów danych, które możesz wykorzystać do uczenia swoich sieci neuronowych. Dzięki niej możesz opracować nowe aplikacje, ale też wskaże Ci ona czy dane problemy są już rozwiązane.
Sprzedaż zamknięta
Poznaj opinie o Twoim prowadzącym



Poznaj opinie o tym programie

Sprzedaż zakończy się za
Pełny program szkoleniowy
Klasyfikacja obrazu
Moduł 1 - Zaczynamy
- Witaj w programie (00:01)
- Kim jest Twój instruktor (00:03)
- Największe mity (00:05)
- Plan gry (00:06)
- Zagadnienia w analizie obrazu (00:12)
- Obecny stan wiedzy (00:10)
- Środowisko pracy – Czego potrzebujesz? (00:06)
- Jak pracować w Google Colab? (00:07)
- Jak pracować lokalnie? Instalacje – TF, PyTorch, OpenCV (00:21)
- Praca domowa (00:02)
Część rzeczy, które zrobisz w tym module:
- Przygotujesz środowisko pracy
- Poznasz obecny stan wiedzy oraz zagadnienia analizy obrazu
- Dołączysz do Discorda, gdzie rozwiązujemy napotkane problemy
Moduł 2 - Reprezentacja obrazu
- Reprezentacja obrazu (00:10)
- Przestrzenie barw (00:13)
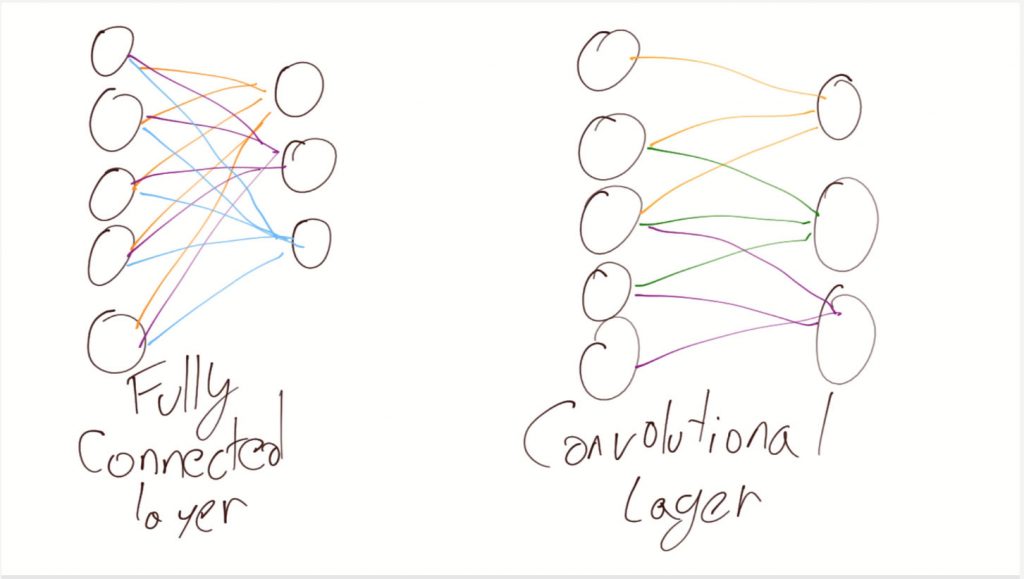
- Operacja konwolucji (00:06)
- Filtry konwolucyjne (00:06)
- Operacje morfologiczne (00:08)
- Preprocessing (00:21)
- Dostępne zbiory danych (00:04)
- Historia (00:07)
- Analiza zbiorów – MNISTopodobnych (00:28)
- Wizualizacja danych (00:08)
- Praca domowa (00:02)
Część rzeczy, które zrobisz w tym module:
- Poznasz przestrzenie barw oraz liczne techniki preprocessingu
- Zrozumiesz jak działają filtry konwolucyjne
- Poznasz historię klasyfikacji obrazu
Moduł 3 - Prosta sieć do klasyfikacji
- Perceptron wielowarstwowy (00:06)
- Sposoby uczenia -Supervised vs self supervised vs unsupervised learning (00:02)
- Proces uczenia nadzorowanego (00:04)
- Funkcja kosztu, regresja liniowa i logistyczna, a klasyfikacja (00:12)
- Metryki w klasyfikacji (00:08)
- Backpropagation (00:06)
- Model problemu (00:03)
- Budowa prostej sieci do klasyfikacji (00:19)
- Budowa prostej sieci konwolucyjnej (00:04)
- Podział danych 70:30 i 80:20 vs 80:10:10 (00:08)
- Implementacja sieci konwolucyjnej (TF/PyTorch/PyTorch Lightning) (00:05)
- Praca domowa (00:09)
Część rzeczy, które zrobisz w tym module:
- Dowiesz się jak trenuje się sieci neuronowe
- Poznasz budowę sieci do klasyfikacji obrazu
- Zbudujesz i wytrenujesz pierwszą sieć neuronową
Moduł 4 - Budowa sieci neuronowej
- Funkcje aktywacji (00:11)
- Historia CNN (00:09)
- Rodzaje warstw konwolucyjnych (00:13)
- Generalizacja, Under/overfitting, regularyzacja (00:12)
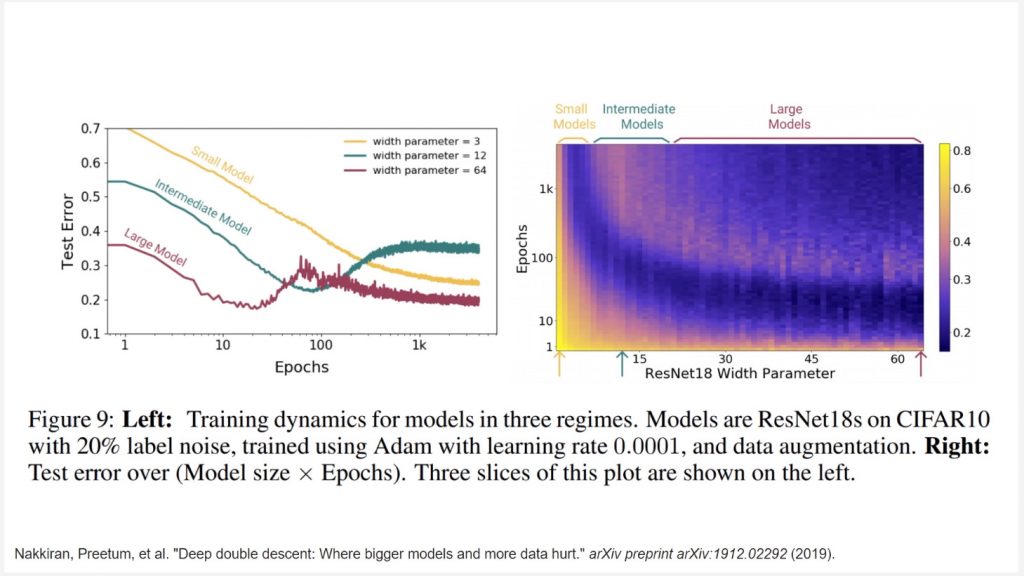
- Double Descent (00:06)
- Optymalizatory (00:14)
- Strategie LR (00:15)
- Spatial/Global Pooling (00:11)
- Dropout (00:06)
- Batch Normalization (00:11)
- Praca domowa (00:02)
Część rzeczy, które zrobisz w tym module:
- Poznasz rodzaje warstw konwolucyjnych
- Poznasz trudniejsze koncepty związane z uczeniem głębokim - np. Deep Double Descent
- Poprawisz wyniki poprzedniego modelu stosując techniki regularyzacji
Moduł 5 - Klasyfikacja zdjęć w praktyce
- Współczesne sieci do rozpoznawania obrazu (00:10)
- Zwykły trening vs Transfer learning vs fine tuning (00:06)
- Gotowe modele – model zoo (00:05)
- Trening transfer learning – implementacja (00:15)
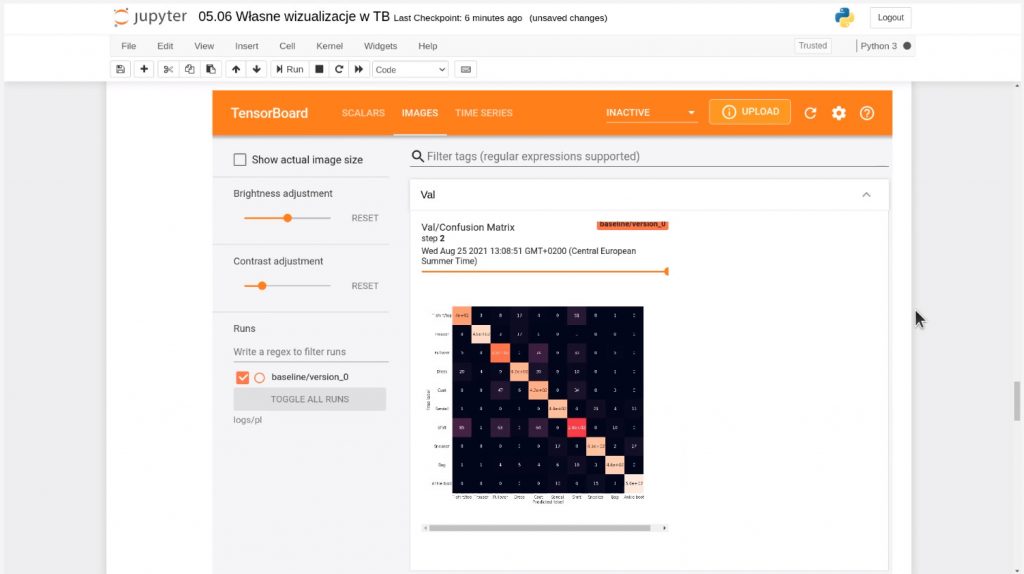
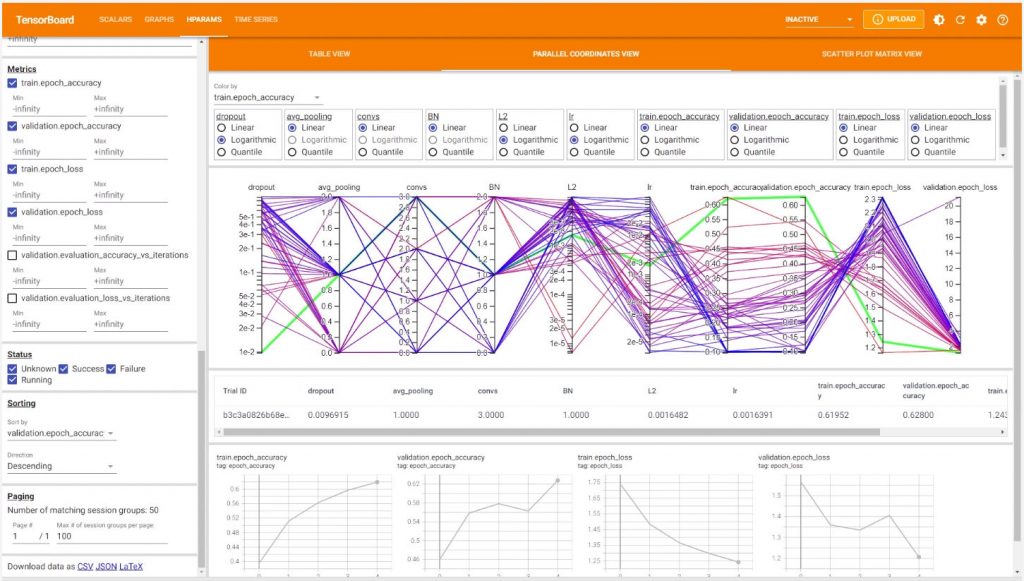
- Monitorowanie treningu w TensorBoard (00:15)
- Własne wizualizacje w TB (00:06)
- TensorBoard HParams (00:06)
- Jak wykorzystać gotowy model? (00:09)
- Jak poprawiać wyniki? (00:06)
- Praca domowa (00:05)
Część rzeczy, które zrobisz w tym module:
- Poznasz TensorBoard jako narzędzie do wizualizacji postępu treningu
- Dowiesz się, skąd możesz brać architektury i gotowe modele do transfer learningu
- Wykorzystasz transfer learning w praktyce
Moduł 6 - Data augmentation
- Rodzaje data augmentation (00:06)
- Przekształcenia geometryczne (00:07)
- Przekształcenia arytmetyczne, koloru (00:04)
- Augmentation jako warstwy w TF Keras (00:10)
- PyTorch Data augmentation (00:09)
- Keras ImageDataGenerator (00:06)
- Kornia (00:08)
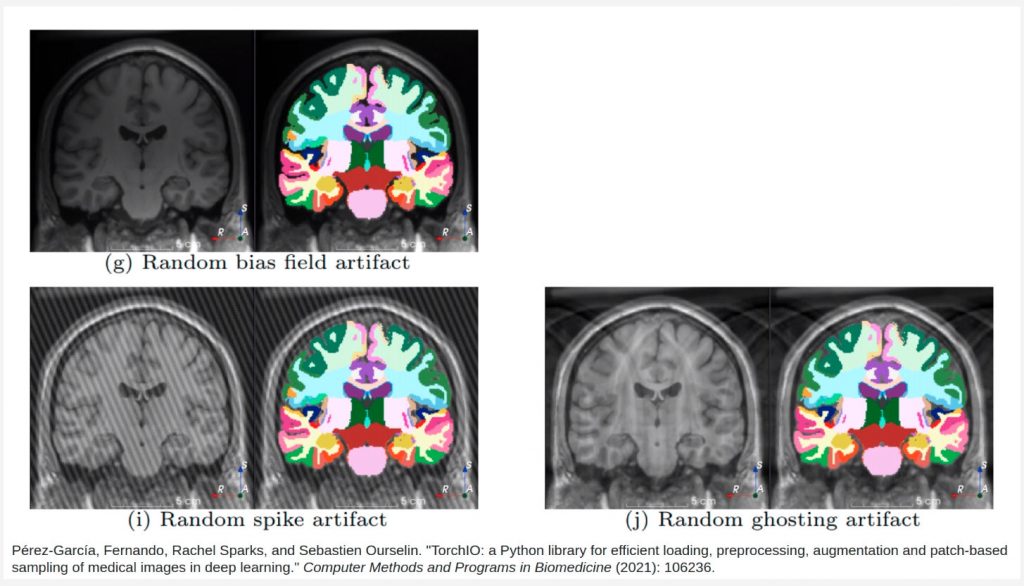
- TorchIO (00:08)
- Albumentations (00:12)
- Praca domowa (00:01)
Część rzeczy, które zrobisz w tym module:
- Dowiesz się jak wykorzystywać techniki data augmentation
- Poznasz biblioteki ułatwiające modyfikacje danych do treningu
- Wykorzystasz data augmentation w praktyce, poprawiając wyniki swojego modelu
Moduł 7 - Dobór hiperparametrów
- Parametry i hiperparametry (00:03)
- Metody optymalizacji hiperparametrów (00:05)
- HPO vs NAS (00:05)
- KerasTuner (00:07)
- AutoKeras (00:04)
- Optuna (00:13)
- Hyperopt (00:04)
- Auto pytorch (00:05)
- Interpretacja wyników – Table vs Parallel coordinates vs Scatter plot matrix (00:05)
- Praca domowa (00:01)
Część rzeczy, które zrobisz w tym module:
- Zrozumiesz różnicę pomiędzy parametrami i hiperparametrami
- Poznasz techniki i narzędzia do automatyzacji doboru hiperparametrów
- Wykorzystasz optymalizację wartości hiperparametrów w praktyce
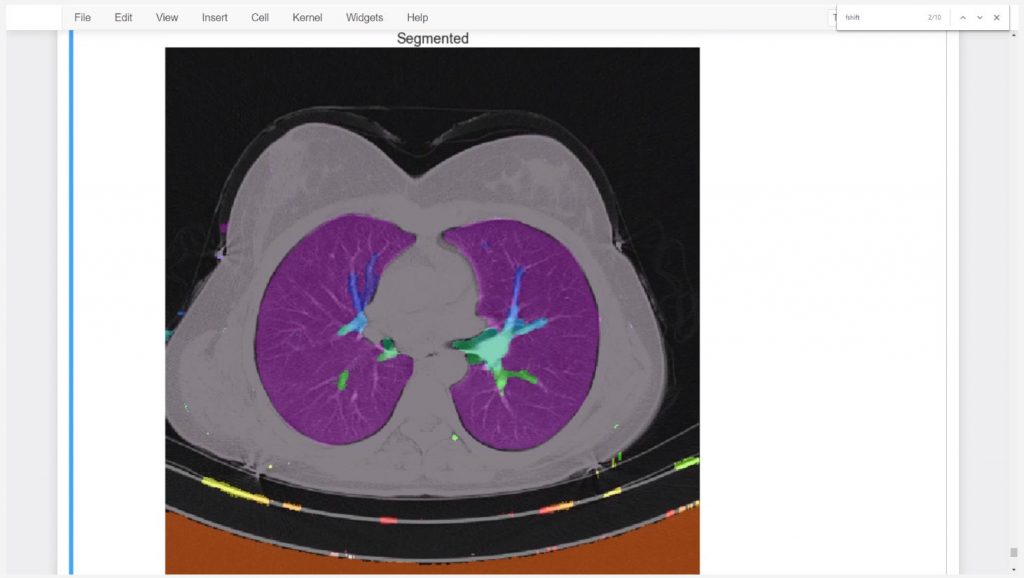
Moduł 8 - Analiza działania modelu
- Dlaczego analizować działanie modelu? (00:04)
- Techniki analizy działania modelu (00:08)
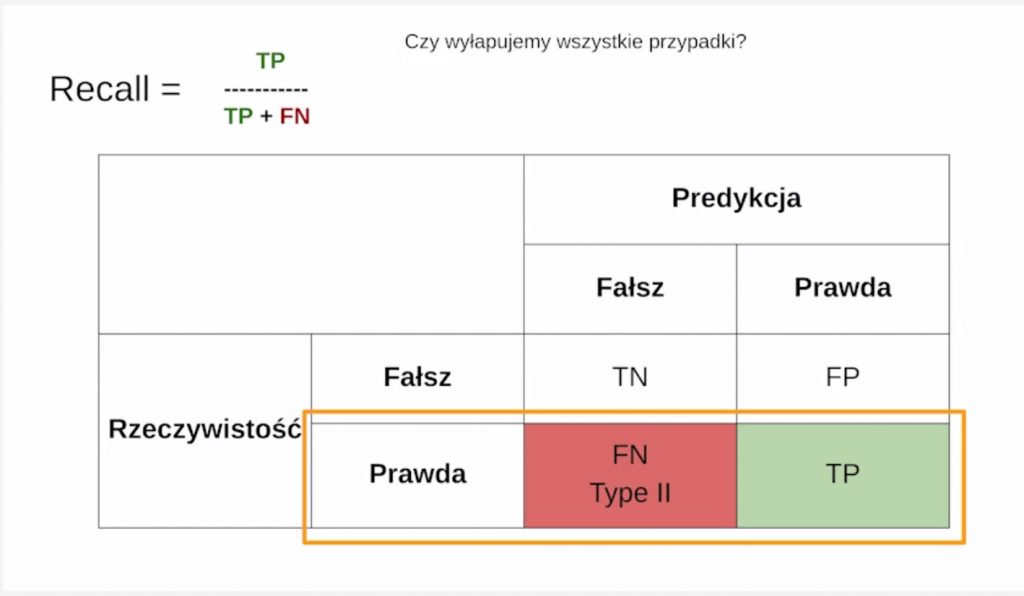
- Macierz pomyłek (00:06)
- Wizualizacja kolejnych warstw sieci (00:09)
- Occlusion sensitivity (00:11)
- T-SNE vs UMAP vs MDE (00:16)
- T-SNE grid (00:06)
- Saliency, SmoothGrad (00:07)
- Integrated Gradients, Gradient X Input (00:06)
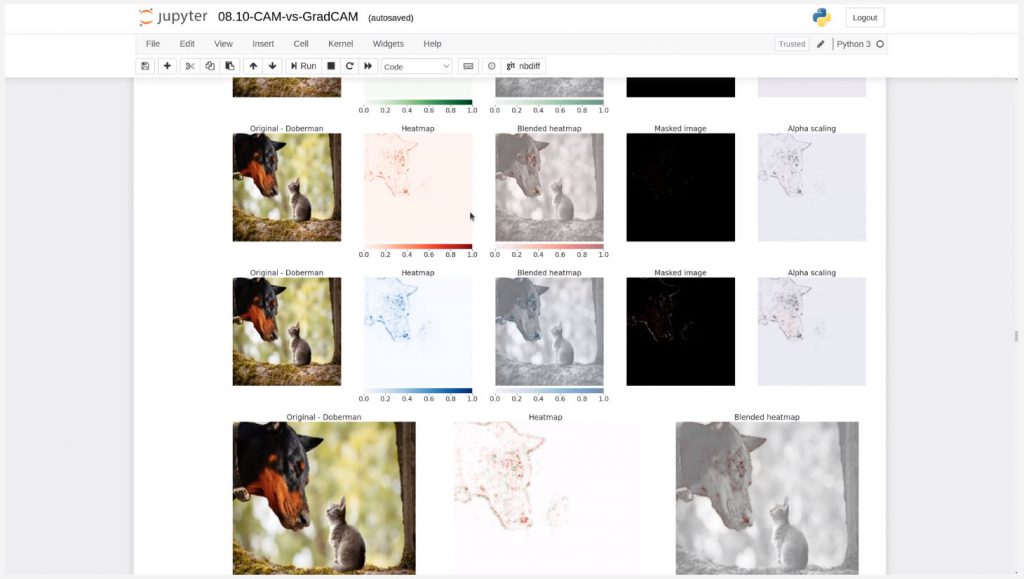
- CAM vs GradCam (00:10)
- Praca domowa (00:01)
Część rzeczy, które zrobisz w tym module:
- Poznasz sposoby analizy działania modelu
- Dowiesz się, jak korzystać z wielu metod jak np. occlusion sensitivity, CAM czy GradCAM
- W praktyce sprawdzisz, dlaczego model popełnił błędy wykorzystując poznane metody
Moduł 9 - Mały zbiór danych
- Kiedy nie stosować transfer learningu? (00:02)
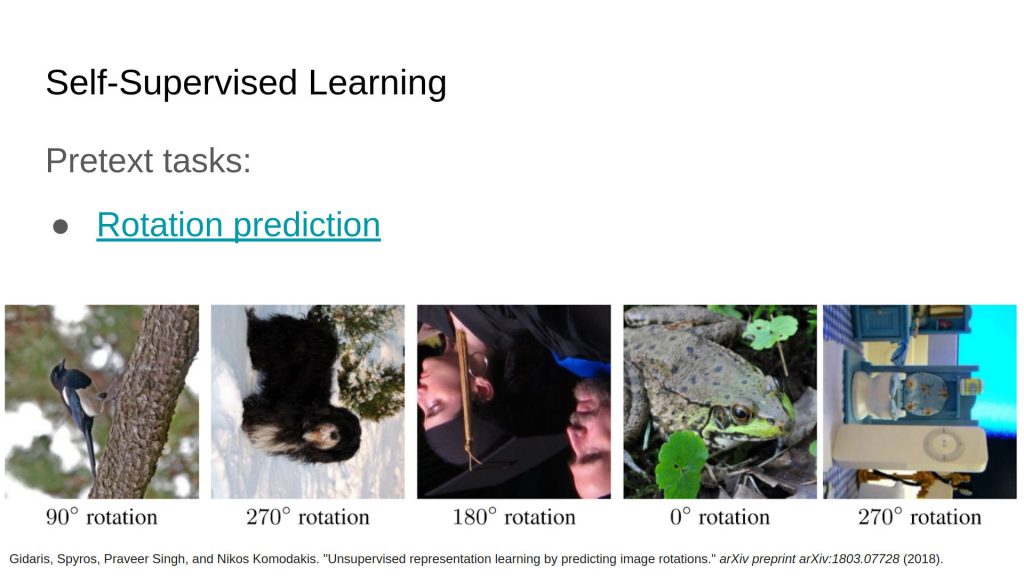
- Self-Supervised Learning (00:05)
- Rotation prediction (00:09)
- SESEMI (00:11)
- Mały vs duży obraz (00:02)
- Mały vs duży model (00:02)
- Lightly – SimCLR (00:09)
- Solo Learn – BYOL (00:06)
- Generowanie danych (00:09)
- Praca domowa (00:02)
Część rzeczy, które zrobisz w tym module:
- Dowiesz się co to jest i jak wykorzystywać Self-Supervised Learning
- Poznasz biblioteki i frameworki do Self-Supervised Learningu
- Skorzystasz z Self-Supervised Learningu, by przygotować model do transfer learningu i wytrenować sieć do klasyfikacji na małym zbiorze
Moduł 10 - Klasyfikacja binarna w praktyce
- Binary vs Multiclass vs Multi label vs Multi task (00:03)
- Sigmoid vs Softmax (00:03)
- Klasyfikacja binarna – trening (00:09)
- High precision vs high recall (00:03)
- Balanced accuracy (00:06)
- FPR, TPR vs threshold (00:09)
- PR Curve vs ROC (00:09)
- Precision vs Recall vs Accuracy vs F1 (00:04)
- Praca domowa (00:06)
Część rzeczy, które zrobisz w tym module:
- Nauczysz się jak wykonywać klasyfikację binarną
- Poznasz metryki i dowiesz się jak je wykorzystać
- Przygotujesz zbiór danych i wytrenujesz samodzielnie model do klasyfikacji binarnej
Moduł 11 - Optymalizacja modelu
- Techniki optymalizacji modelu (00:06)
- CPU vs GPU vs TPU (00:09)
- Wielkość batcha (00:03)
- FP32 vs FP16 vs INT8 (00:13)
- Kwantyzacja TensorFlow (00:12)
- Kwantyzacja PyTorch (00:13)
- Pruning (00:18)
- TensorRT (00:09)
- Destylacja wiedzy + przykład (00:09)
- Praca domowa (00:01)
Część rzeczy, które zrobisz w tym module:
- Poznasz techniki przyspiesznia pracy modelu
- Zrozumiesz na czym polega pruning i kwantyzacja
- W praktyce wykorzystasz techniki optymalizacji modelu
Moduł 12 - Wdrażanie modelu
- Sposoby wdrożenia (00:10)
- fastapi (00:07)
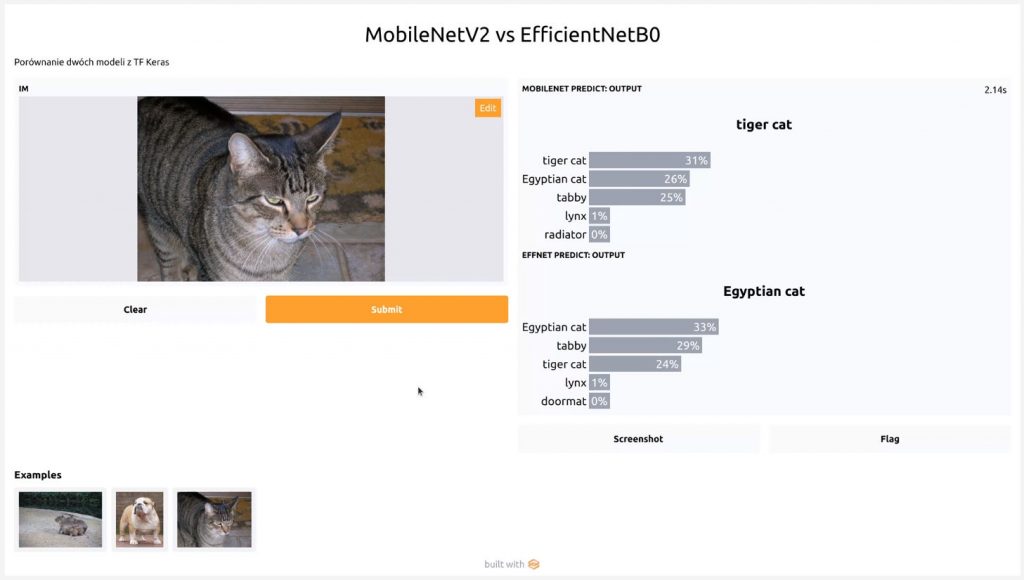
- Streamlit (00:08)
- Gradio.app (00:03)
- Docker (00:12)
- TensorFlow serving (00:07)
- Torch serve (00:04)
- Nvidia Triton (00:10)
- MLFlow (00:09)
- Praca domowa (00:01)
- Prośba, certyfikat i pożegnanie (00:01)
Część rzeczy, które zrobisz w tym module:
- Poznasz sposoby wdrażania modelu
- Dowiesz się, w jaki sposób możesz wdrożyć model w różnych frameworkach
- Uruchomisz model jako interaktywne demo w przeglądarce
BONUS - Live / Q&A
- Szkolenie – klasyfikacja obrazu 2021 (01:53)
- Nagrania spotkań na żywo (09:44)
Przykładowe lekcje
Moduł 8: Analiza działania modelu
Lekcja 5: Occlusion sensitivity
Moduł 9: Mały zbiór danych
Lekcja 3: Rotation prediction
Dołącz do ponad 100 osób,
które już są w programie!
Dołączając teraz otrzymujesz:
- 12-modułowy program szkoleniowy
- 11 praktycznych prac domowych - w praktyce będziesz rozwijać swoje umiejętności
- Analizę Twojej pracy – sprawdzimy Twoje rozwiązania zadań domowych, otrzymasz pomoc
- Gwarancję satysfakcji - zwrot pieniędzy przez 30 dni
- Bezpłatne aktualizacje materiałów - wszystkie kolejne edycje
- Gwarancję najniższej ceny - już nigdy ten program nie pojawi się w niższej cenie niż teraz
- Od razu otrzymasz dostęp do wszystkich materiałów
Sprzedaż zakończy się za
Sprzedaż zamknięta
Czy jest inna droga?
Możesz samodzielnie zdobywać wiedzę, korzystając z Internetu. Zajmie Ci to więcej czasu i będziesz wykorzystywać wiele różnych źródeł.
- Popełnić samodzielnie wiele błędów podczas trenowania sieci
- Sprawdzić setki nagrań szkoleń na YouTube, książek i artykułów naukowych
- Skorzystać z kilku kursów online dotyczących poszczególnych zagadnień osobno
- Przyswajać wszystkie treści w języku angielskim
- Eksperymentować z architekturami i hiperparametrami treningu bez kontroli
Dużym problemem w samodzielnej nauce jest brak możliwości weryfikacji materiałów oraz w praktyce – brak pomocy. Rozpoczynając przygodę z klasyfikacją obrazu, natrafisz na wiele problemów, z którymi trzeba się zmierzyć. Pomocy będziesz poszukiwać na różnych forach, repozytoriach czy bazach wiedzy. Ze względu na fakt, że głębokie uczenie wciąż się rozwija, także w kontekście klasyfikacji obrazu, trudno będzie Ci pozostać na bieżąco z dobrymi praktykami.
Nie otrzymasz wtedy mojego wsparcia oraz wsparcia grupy.
Pytania i odpowiedzi
1. Czy dostęp do programu jest dożywotni?
Tak, ale bardziej „dożywotni”, bo dopóki istnieć będzie DeepDrive PL. W ramach dostępu otrzymasz program szkoleniowy ze wszystkimi późniejszymi aktualizacjami i dodatkowymi materiałami. Osoby dołączające później nie otrzymają tak wiele bonusów. W przypadku gdyby ten program miał przestać istnieć – otrzymasz wszystkie materiały.
2. Co mam zrobić, jeśli program mi nie odpowiada?
W ciągu 30 dni od otrzymania dostępu do programu wystarczy, że wyślesz maila z informacją, że chcesz skorzystać ze zwrotu pieniędzy. Nie pytam o powód, przelewam od razu.
3. Czy dostanę dostęp do wszystkich materiałów od razu?
Tak! Wszystkie treści są już przygotowane i natychmiastowo otrzymasz dostęp do całego programu.
4. Ile czasu trwa przerobienie programu?
Program jest podzielony na moduły tygodniowe, aby ułatwić jego przerobienie. Istnieje duża szansa, że uda Ci się poświęcić nie więcej niż tydzień na każdy z 12 modułów.
5. Czy dostanę fakturę na firmę za ten program?
Tak. W przypadku gdy dokonujesz zakupu na firmę otrzymasz fakturę, wystarczy, że kupując wypełnisz dane.
6. Czy potrzebuję komputera z kartą graficzną Nvidia?
Nie, ale warto. Program możesz realizować wykorzystując np. Google Colab, który pozwala wykorzystać zasoby chmurowe, także GPU. W przypadku gdy chcesz uczyć sieci lokalnie, na swojej maszynie, warto mieć kartę graficzną (GPU) od Nvidia’i. Niestety karta Intela, czy AMD nie da Ci gwarancji uruchomienia wszystkiego i może przysporzyć kłopotów podczas instalacji.
7. Czy mogę pracować na Windowsie?
Tak i tak. 2x tak, bo zarówno w przypadku pracy w chmurze jak i lokalnie z własną kartą graficzną. Nie ma tutaj ograniczeń.
8. Umiem budować i trenować modele w TF i PyTorchu, czy ten program jest dla mnie?
Każdy przypadek jest indywidualny, więc koniecznie przejrzyj agendę programu. Jeżeli znajdziesz tam rzeczy nowe – być może warto. Również gdy chcesz odświeżyć wiedzę, albo spojrzeć z innej perspektywy.
9. Nie mam za sobą studiów IT, czy ten program jest dla mnie?
Głębokie uczenie to przede wszystkim matematyka. Warto znać funkcje trygonometryczne, logarytmy, pochodne, różniczkowanie i operacje na macierzach. Jeżeli nie umiesz różniczkować bez ściągi, to nie ma problemu. W tym programie chcę Cię przeprowadzić krok po kroku przez proces uczenia, także postaram się wszystko jak najlepiej wytłumaczyć
10. Nie mam doktoratu, czy ten program szkoleniowy jest dla mnie?
Doktorat nie jest warunkiem koniecznym, także zastanów się, czy znajdziesz tu porcję wiedzy, której potrzebujesz i niebawem się widzimy. Mógłbym powiedzieć, że ja już mam, więc Ty nie musisz. Natomiast chodzi o to, by podzielić się wiedzą w przystępny sposób.
11. Czy będę mieć z Tobą kontakt?
Możliwe, że w ocenie rozwiązań. Nie – nie pogadamy 1:1 w ramach tego programu.
12. Czy otrzymam zwrot gdy program szkoleniowy mi się nie spodoba?
Tak. Otrzymasz zwrot, niezależnie od powodu, jeżeli zgłosisz się w ciągu 30 dni od uzyskania dostępu do lekcji.
13. Chcę kupić więcej dostępów dla pracowników, co zrobić?
Złóż zamówienie mailem na karol@deepdrive.pl
14. Nie zdążę z zakupem z budżetu szkoleniowego, co zrobić?
Złóż zamówienie mailem na karol@deepdrive.pl możesz otrzymać fakturę proformę, jeżeli to jest potrzebne w organizacji. Ważne jest, by zdążyć w terminie ze złożeniem zamówienia, płatności bywają opóźnione.
15. Czy będzie możliwość zakupu później?
Po zamknięciu sprzedaży nastąpi przerwa. Zwykle możliwość dołączenia wraca po kilku miesiącach, w cenie nieniższej.
16. Kiedy pojawią się pierwsze materiały?
Wszystkie materiały są już dostępne, otrzymasz dostęp natychmiast do całego programu.
17. Nie dam rady teraz, potrzebuję się jeszcze douczyć, uczestniczę teraz w innych kursach
Zapraszam w przyszłych edycjach! Możesz też dołączyć teraz, po lepszej cenie – materiały i możliwość otrzymania certyfikatu nie znika z czasem.
18. Czy otrzymam certyfikat?
Tak, po zaakceptowaniu wszystkich prac domowych.
19. Potrzebuję potwierdzenia umiejętności na LinkedInie, czy to możliwe?
Jak najbardziej, ale podobnie jak w przypadku certyfikatu – po ukończeniu wszystkich prac domowych.
20. Nie mam zgody firmy, nie zdążymy, co robić?
Zakup wypełniając dane firmy do faktury, jeżeli firma się nie zgodzi, możemy wykonać zwrot.
Inna droga – złóż zamówienie mailem na karol@deepdrive.pl (proforma, płatność przelewem)
Oto wszystko co otrzymasz dołączając do programu
- 12-modułowy program szkoleniowy, który przeprowadzi Cię przez proces analizy danych, projektowania sieci, trenowania modelu i analizy wyniików
- Zadania, wraz z kodem do uruchomienia w chmurze lub lokalnie
- 100 jupyter - notebooków (Google Colab / lokalnie) z przykładami
- Dostęp do zamkniętego Discorda, możliwość wymiany problemów i rozwiązań
- Dostęp do wszystkich aktualizacji programu
- Dostęp do linków, artykułów, kodów źródłowych, notebooków, checklist i map myśli
- Moduły bonusowe
- Dostęp 24/7
- Dostęp do bazy wiedzy i zbiorów danych
- 30 dni gwarancji satysfakcji
- Fakturę VAT na firmę (jeśli potrzebujesz; cena brutto się nie zmienia)
- Bezpłatne aktualizacje materiałów
- Analizę Twojej pracy – sprawdzimy Twoje rozwiązania prac domowych z programu
- Certyfikat ukończenia, potwierdzenie umiejętności na LinkedInie - po zaakceptowaniu wszystkich prac domowych