
ROS Melodic na Jetson Nano – Jak zainstalować?
Naprawdę krótki wpis w którym pokazuję instalację ROSa na Jetsonie Nano. Krok po kroku i nic ponad to. Zainstalujemy ROS Melodic – wersję o przedłużonym wsparciu z 2018 roku, mimo że wyszła już nowa i ostatnia wersja ROS1 – Noetic. Instalacja ROS Melodic na Jetson Nano Warto poniższe kroki wykonywać osobno,...
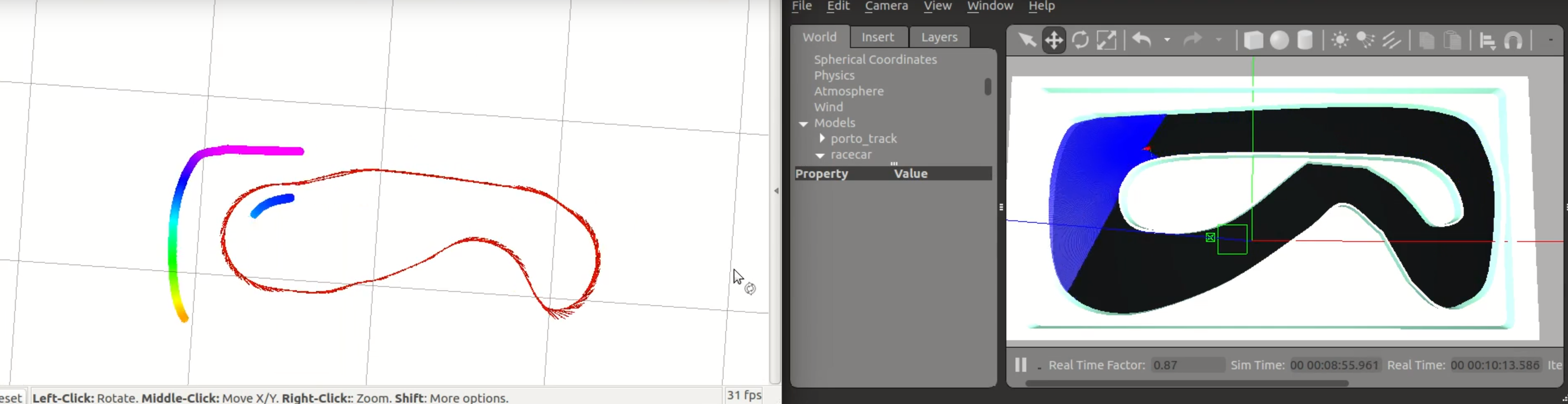
Jak uruchomić symulator F1/10 w Gazebo ROS
W tym poście dowiesz się jak zainstalować i uruchomić symulator F1tenth w Gazebo ROS. Pokażę Ci jak uruchomić symulator wraz z kodem, który jeździ po torze!...
Jak zainstalować ROSa na Ubuntu 16.04
Chcesz zacząć swoją przygodę z ROSem (Robot Operating System), ale nie wiesz jak zainstalować ROSa na Ubuntu 16.04? Tutaj pokażę Ci jak to zrobić w bardzo prosty sposób!...
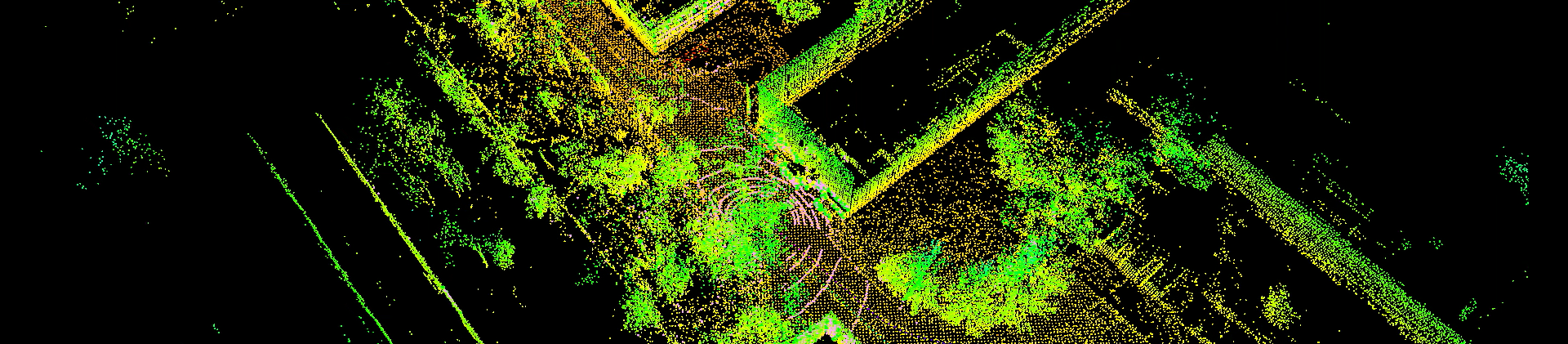
LeGO-LOAM – Lidar Odometry and Mapping
Jeśli chcesz tworzyć trówymiarowe mapy, a masz tylko laser, LeGO-LOAM jest dla Ciebie! Wymaga jedynie chmur punktów z Velodyne’a. Opcjonalnie możesz dodać IMU....
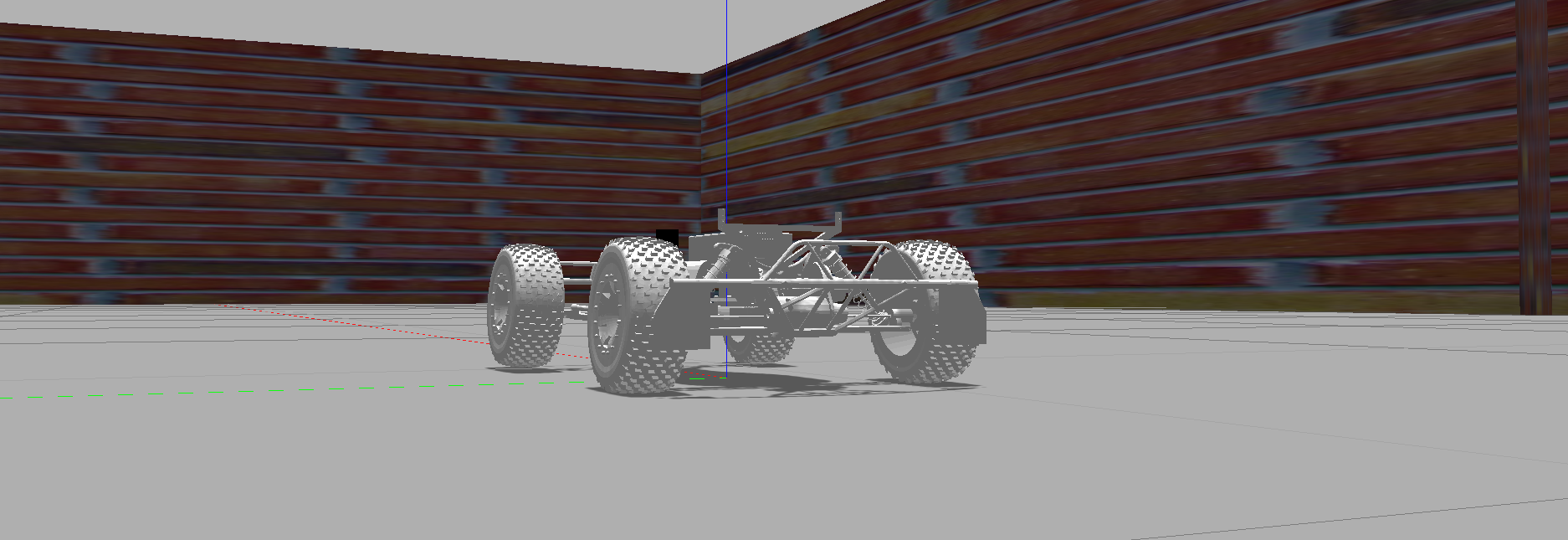
Symulator samochodu F1/10 w Gazebo, ROS – jak uruchomić?
W tym poście pokażę Ci jak możesz uruchomić własny symulator samochodu w skali 1:10. Wykorzystamy system ROS oraz symulator Gazebo by rozpocząć autonomiczną jazdę!...