
Jak uruchomić symulator F1/10 w Gazebo ROS
W tym poście dowiesz się jak zainstalować i uruchomić symulator F1tenth w Gazebo ROS. Pokażę Ci jak uruchomić symulator wraz z kodem, który jeździ po torze!
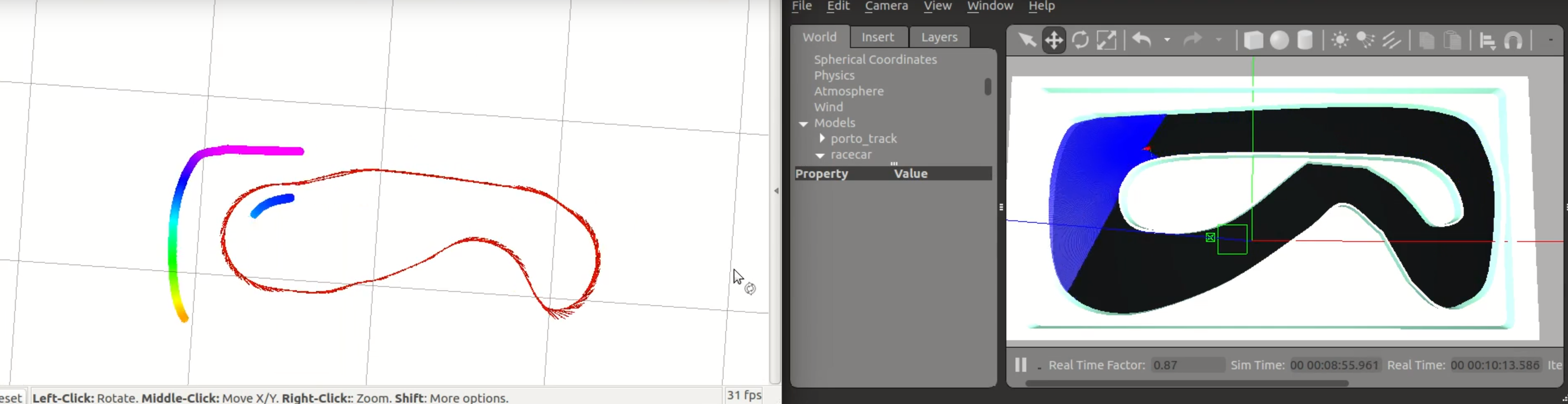
Symulator F1/10
Ten post nie jest kompletny, a i tak myślę, że może wnieść sporo. Jeśli masz problem z uruchomieniem, to koniecznie do mnie napisz, postaram się Tobie pomóc, a przy okazji poprawię/uzupełnię ten wpis.
Mi się udało uruchomić ten symulator będąc w Turynie, dzień przed zawodami. Wierzę, że możesz go lepiej wykorzystać, mając do niego dostęp wcześniej.
Symulator wykorzystuje ROS i Gazebo. Od razu mamy dostęp do symulowanego lasera i kamery ZED. Widok z kamery Cię nie zachwyci, więc skupiłbym się na laserze (można modyfikować liczbę wiazek, zasięg, dokładność i szum!)
Instalacja najnowszego Gazebo (obecnie 9.0)
Instrukcja jest niezależna od najnowszej wersji, zawsze powinna zainstalować najnowszą stabilną wersję symulatora Gazebo:
wget https://bitbucket.org/osrf/release-tools/raw/default/one-line-installations/gazebo.sh sh gazebo.sh
Jeśli chcesz pobrać skrypt ręcznie to wystarczy, że klikniesz tu: http://get.gazebosim.org/. Gdy uruchomisz pobrany skrypt wpisując sh gazebo.sh zainstaluje się symulator. Przy instalacji poprosi o prawa administratora.
Repozytorium F1/10 z trasami i symulatorem
Pobierz to repozytorium do swojego katalogu catkin_ws/src:
https://github.com/karolmajek/f110-fall2018-skeletons
cd catkin_ws/src git clone https://github.com/karolmajek/f110-fall2018-skeletons.git git clone https://github.com/ros-drivers/driver_common.git
Zbuduj, a potem uruchom roslaunch race f1_tenth.launch
cd .. catkin_make roslaunch race f1_tenth.launch
I to wszystko. Poniżej filmy. Jeśli napotkasz problemy – pisz do mnie!
Ja miałem problem z gazebo – po uruchomieniu pojawiał się pusty symulator (z czarnym ekranem zamiast czegokolwiek) i nic się nie działo.
Pomogło przeinstalowanie ROSa i gazebo (sudo apt purge ros-* gazebo*)
Dodaj komentarz