
Dostałem 105 TPU z Tensorflow Research Cloud!
Tensorflow Research Cloud rozdaje dostęp do 1000 procesorów tensorowych TPU dla najlepszych naukowców na świecie. Dostałem 105 TPU z tej puli na 30dni.
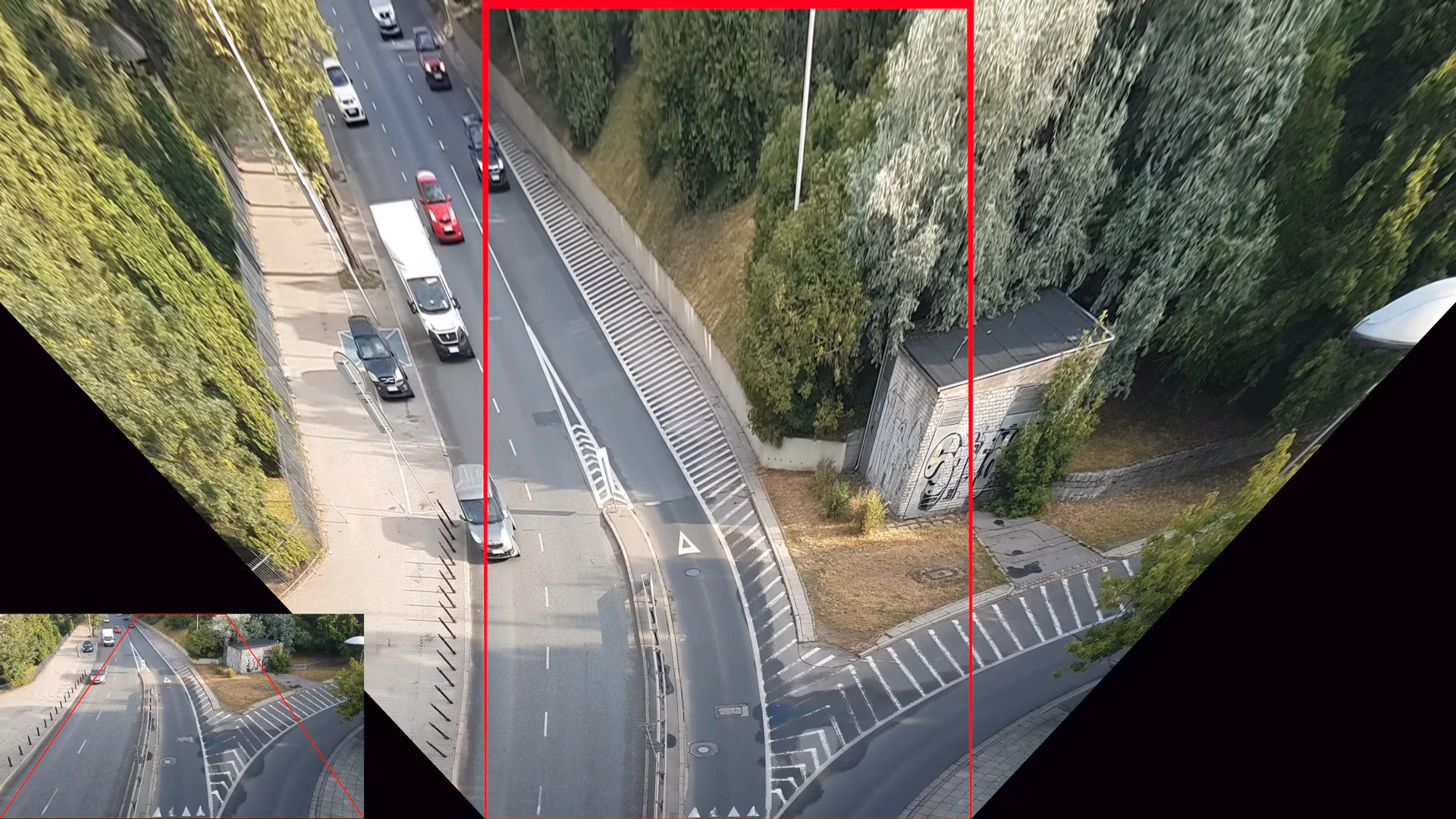
Korekcja perspektywy w OpenCV
Jak wykonać korekcję perspektywy wykorzystując bibliotekę OpenCV? W tym poście pokażę Ci jak przekształcić widok z kamery aby uzyskać widok z góry.
Jak zainstalować ROSa na Ubuntu 16.04
Chcesz zacząć swoją przygodę z ROSem (Robot Operating System), ale nie wiesz jak zainstalować ROSa na Ubuntu 16.04? Tutaj pokażę Ci jak to zrobić w
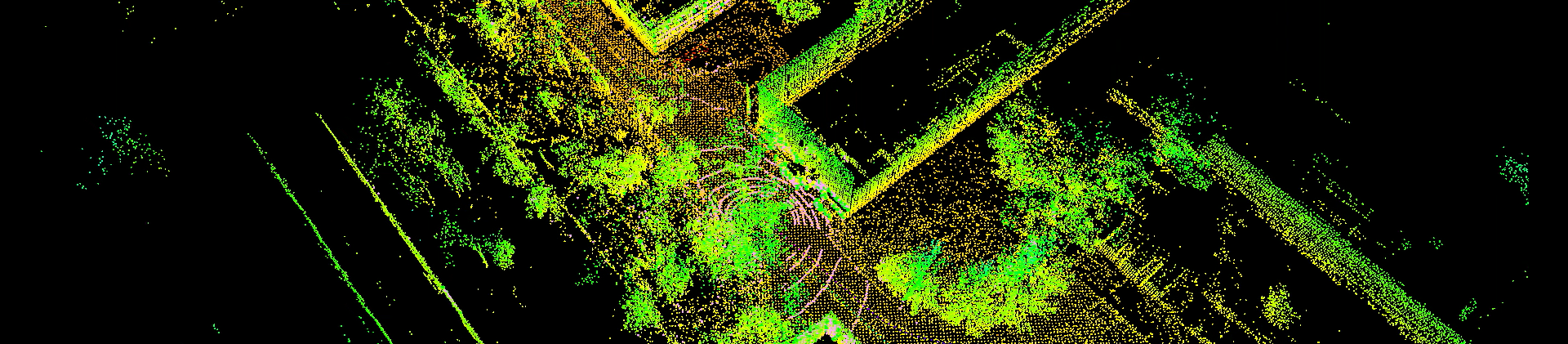
LeGO-LOAM – Lidar Odometry and Mapping
Jeśli chcesz tworzyć trówymiarowe mapy, a masz tylko laser, LeGO-LOAM jest dla Ciebie! Wymaga jedynie chmur punktów z Velodyne’a. Opcjonalnie możesz dodać IMU.
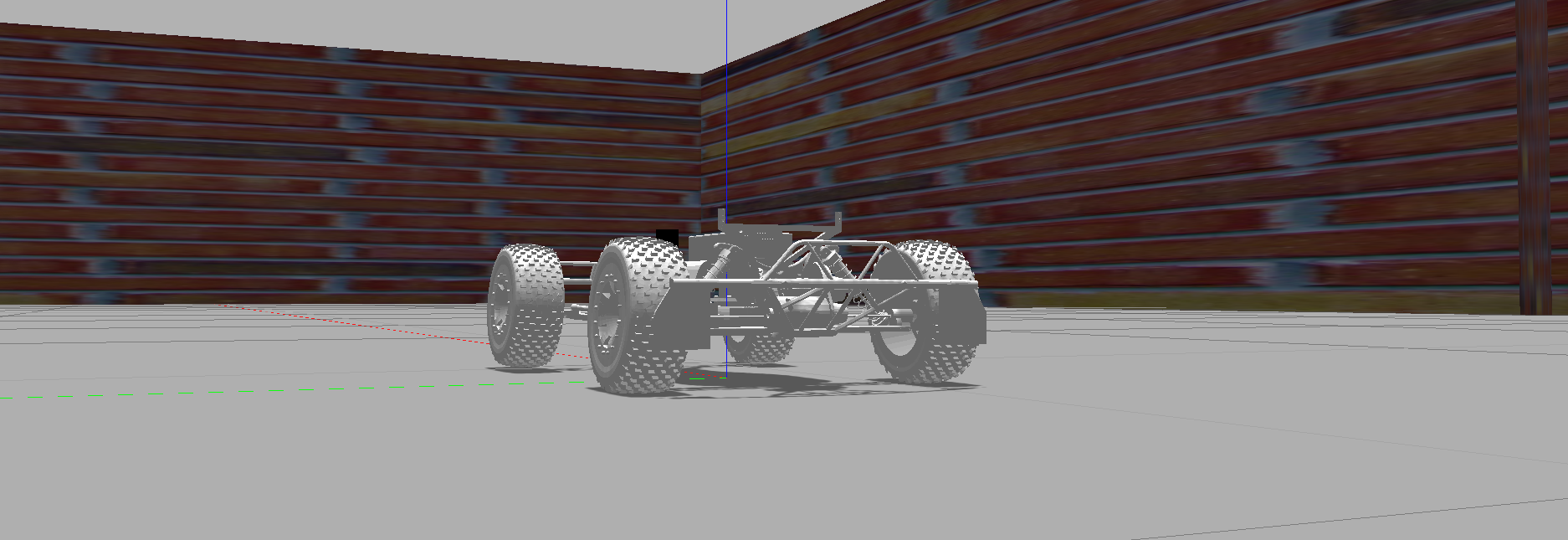
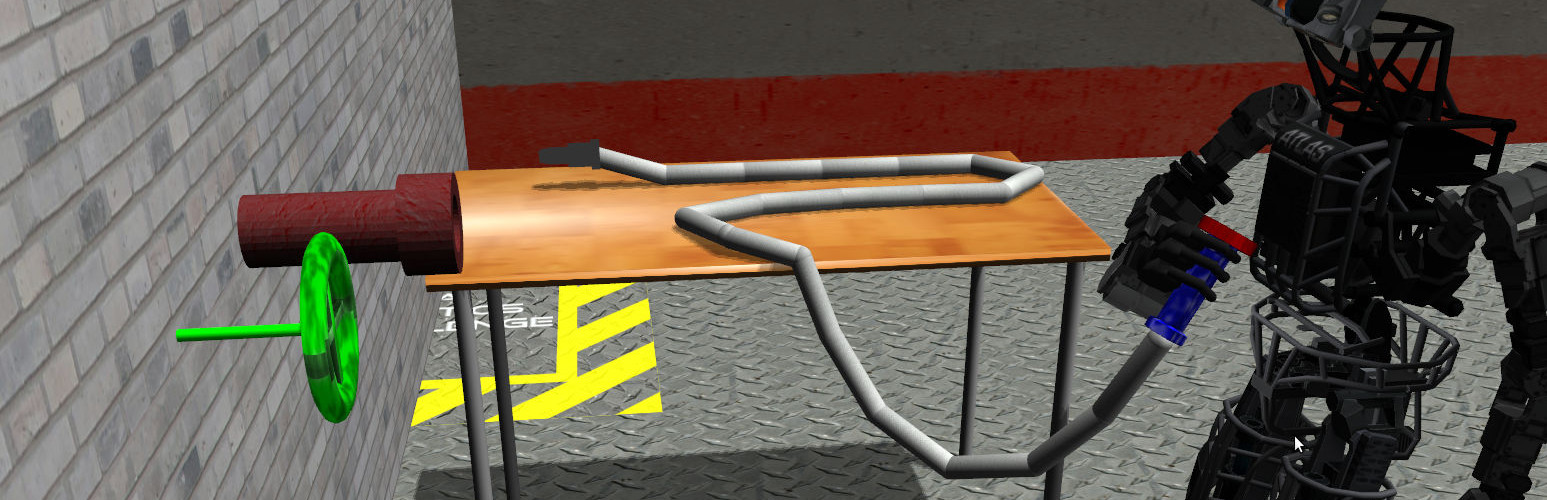
Symulator samochodu F1/10 w Gazebo, ROS – jak uruchomić?
W tym poście pokażę Ci jak możesz uruchomić własny symulator samochodu w skali 1:10. Wykorzystamy system ROS oraz symulator Gazebo by rozpocząć autonomiczną jazdę!

WSDC Warsaw Self-Driving Cars – Pierwszy Meetup!
26 lipca 2018 odbył się pierwszy Meetup grupy Warsaw Self-Driving Cars! Rozmawialiśmy o projektach w skali 1:10 i projektach w skali świata. Udostępniamy prezentacje i nagranie