Segmentacja semantyczna, wykrywanie obiektów, przejezdne obszary oraz oznaczenia pasów – to wszystko na ponad 100 000 filmach w rozdzielczości HD. Nagrane o różnych porach dnia, różnych porach roku. Dane zawierają lokalizację, stempel czasu oraz informacje z akcelerometrów.
Dane pochodzą z 4 lokalizacji z czego 3 znajdują się praktycznie w jednej okolicy (SF, Berkeley i Bay Area), czwartą lokalizacją jest Nowy Jork.
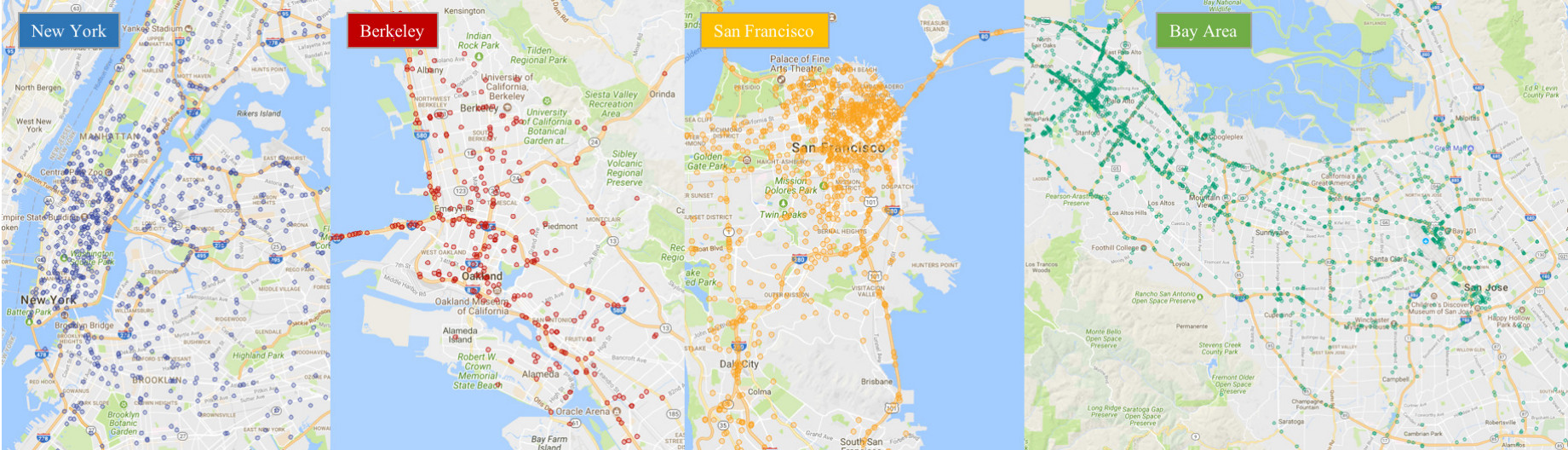
Cztery lokalizacje [4]
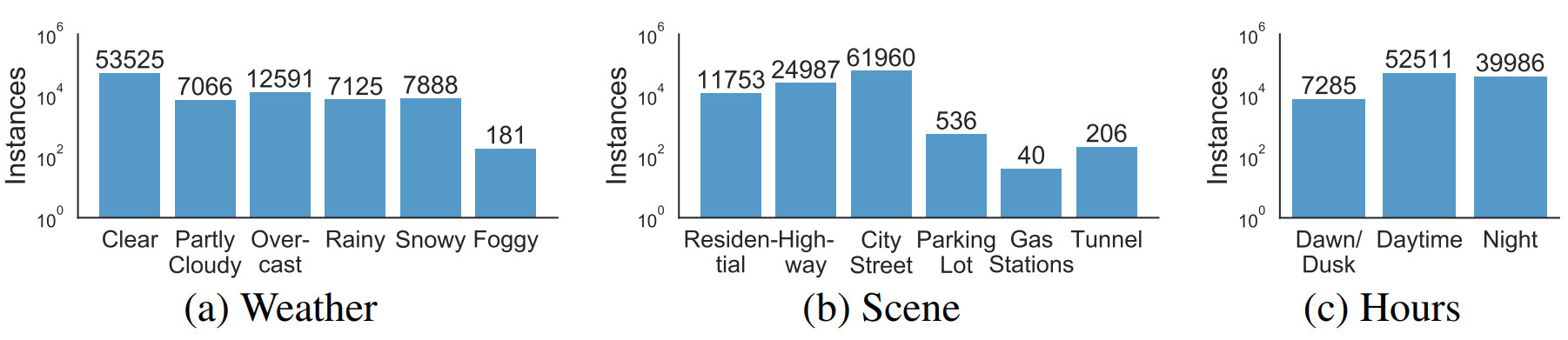
Dystrybucja danych – pogoda, okolica i czas [4]
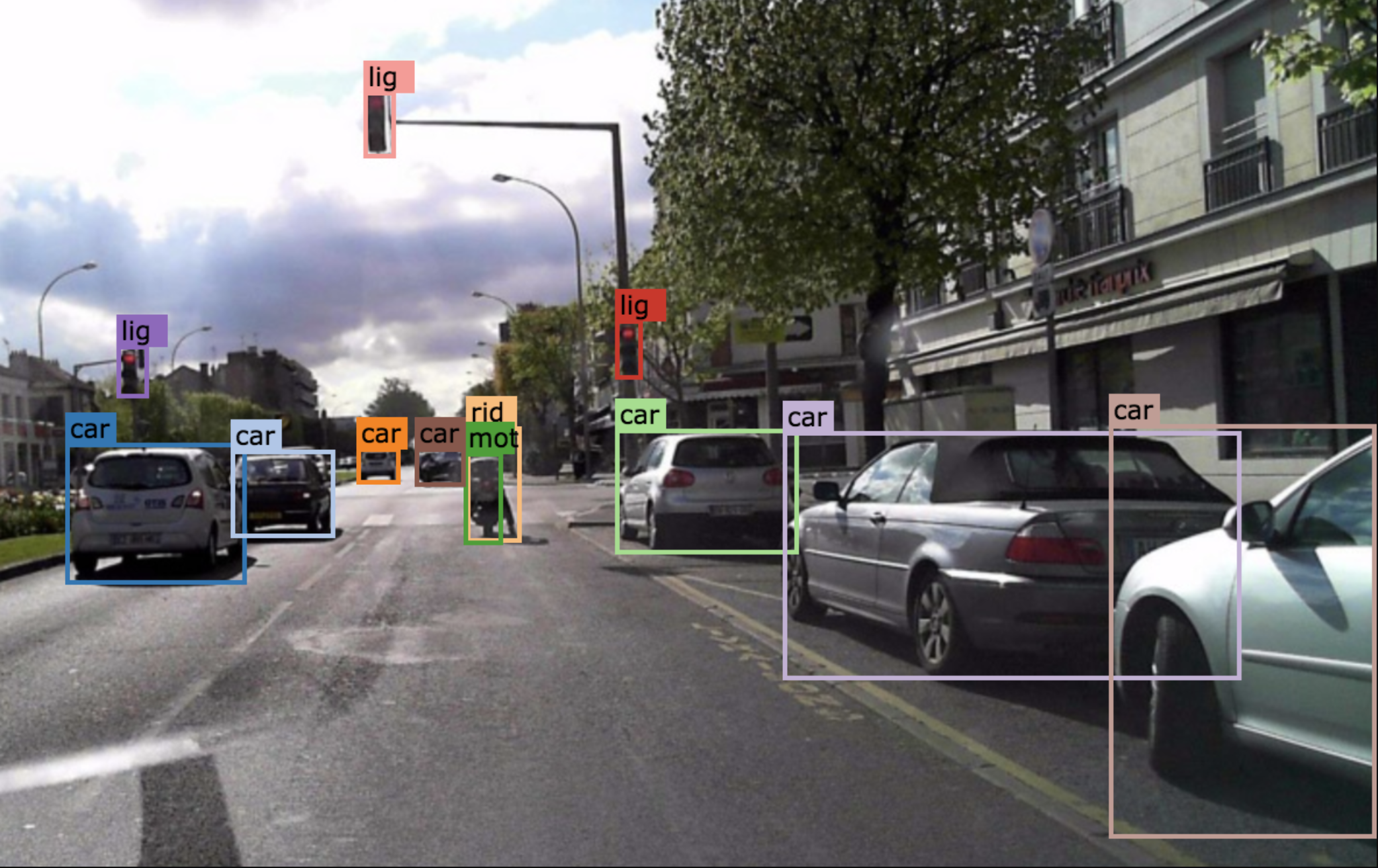
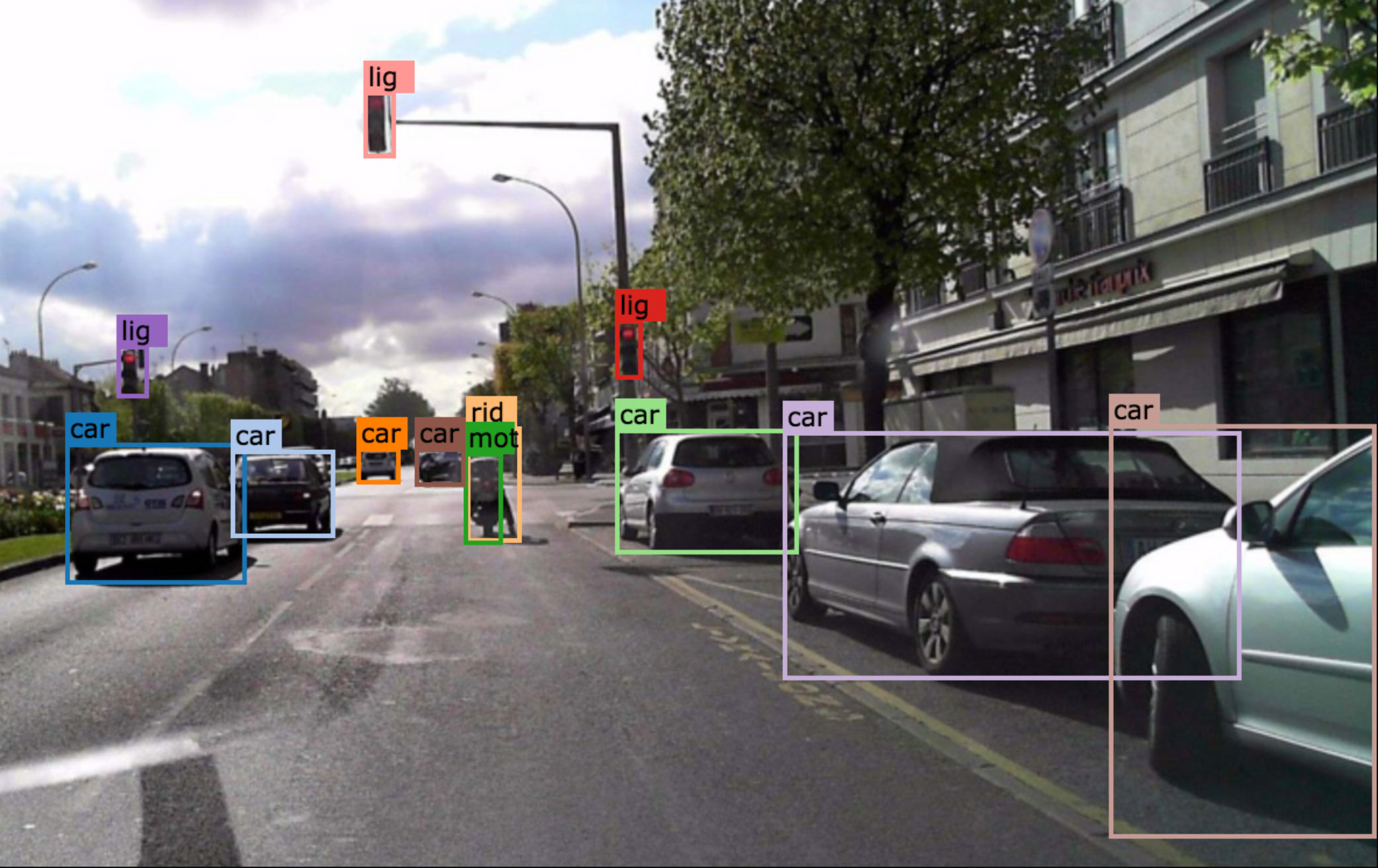
Dane do wykrywania obiektów [2]

Liczba instancji dla każdej z klas oraz liczba przesłonięć i przycięć [4]
- bike
- bus
- car
- motor
- person
- rider
- traffic light
- traffic sign
- train
- truck
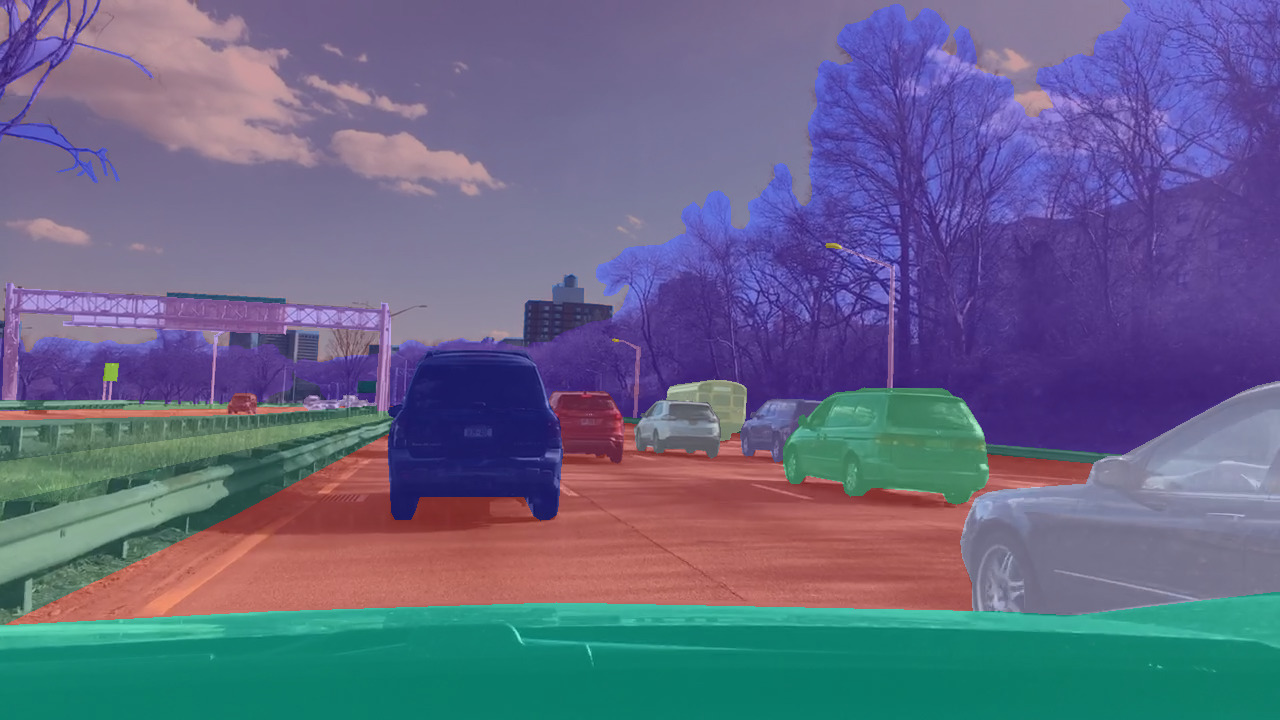
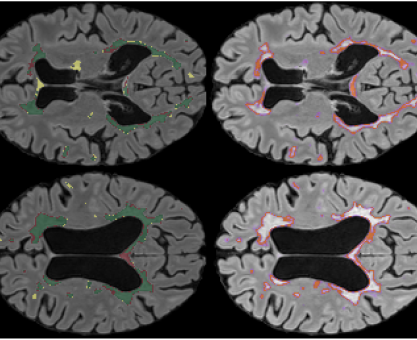
Segmentacja instancji [2]
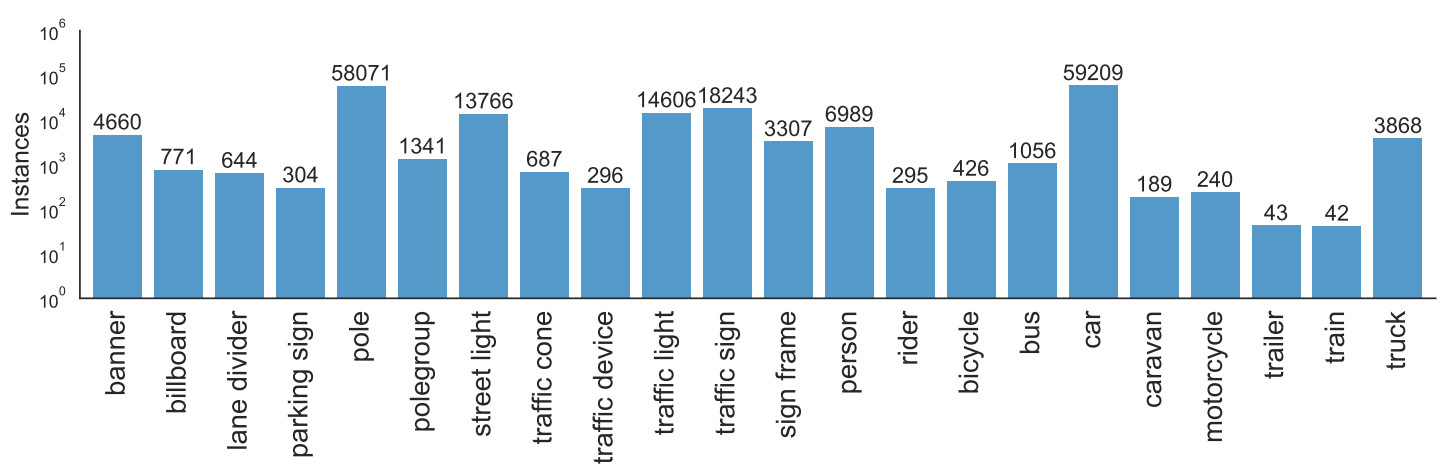
Dystrybucja liczby instancji dla segmentacji [4]
- banner
- billboard
- lane divider
- parking sign
- pole
- polegroup
- street light
- traffic cone
- traffic device
- traffic light
- traffic sign
- sign frame
- person
- rider
- bicycle
- bus
- car
- caravan
- motorcycle
- trailer
- train
- truck

Obszary przejezdne [2]
- area/drivable – aktualny pas ruchu
- area/alternative – pozostałe pasy ruchu

Oznaczenia pasów [2]

Liczba instancji dla oznaczeń pasów [4]
- lane/crosswalk
- lane/double other
- lane/double white
- lane/double yellow
- lane/road curb
- lane/single other
- lane/single white
- lane/single yellow
Podsumowując otrzymaliśmy bardzo ciekawy zbiór danych, z dość małą liczbą kategorii wykrywanych obiektów. Obiekty oznaczone w zbiorze są mocno nastawione na to co możemy spotkać na drodze.
Zachęcam do wytrenowania sieci neuronowej do wykrywania obiektów!
Jeśli potrzebujesz pomocy – pisz do mnie!
Linki