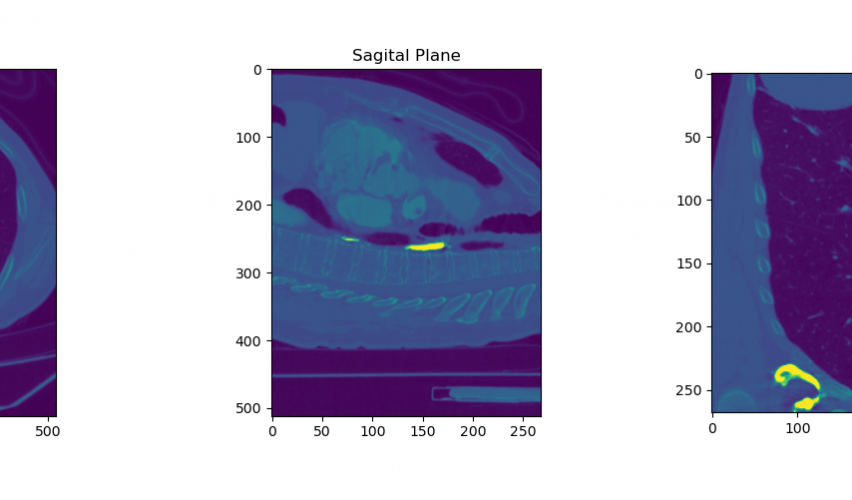
Wykreślanie płaszczyzny osiowej, koronalnej i strzałkowej na obrazie DICOM w Pythonie
Anatomiczne płaszczyzny ciała człowieka są niezwykle ważne w radiologii, będące podstawą do przeprowadzenia prawidłowego badania. Bez tej wiedzy trudno o uzyskanie wiarygodnego skanu. O ile zagadnienie płaszczyzn anatomicznych jest modułem obowiązkowym na kierunkach medycznych, tak informatykom sprawia to niemałą...

Stable Diffusion, textual inversion i kosmiczne awatary generowane przez AI
Stwórz zapierające dech w piersiach, magiczne awatary przedstawiające Ciebie w różnych epokach, stylach, nastrojach. To technologia, której nigdy jeszcze nie widziałeś! Te i wiele innych haseł przeczytać można w opisach wszechobecnych ostatnio stron i aplikacji oferujących generowane przez sztuczną inteligencję...
Model CNN do klasyfikacji samochodów
W tym poście postaram się pokazać drogę tworzenia modelu konwolucyjnej sieci neuronowej do klasyfikacji samochodów wg. marki, modelu i rocznika. Zacznę od analizy zbioru danych, potem porównam model z jednym i z trzema wyjściami, skorzystam z tf.data i learning rate warm-up do poprawy działania modelu, a na koniec porównam...
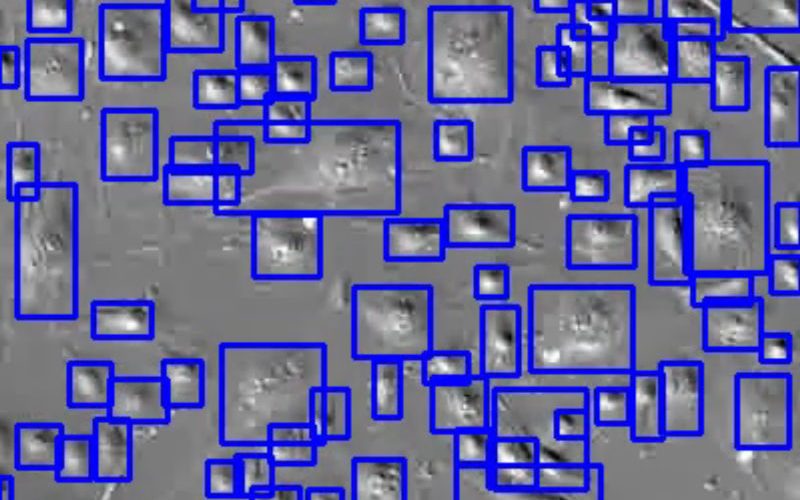
Trening YOLOv4 na własnym zbiorze – Migracja komórek CTMC-v1
W tym wpisie pokażę Tobie jak wytrenować YOLOV4 mając zbiór z oznaczonymi obiektami. Wszystko się będzie działo na przykładzie migracji komórek ze zbioru CTMC-v1. Zbiór ten jest częścią MOT Challange – konkursu śledzenia wielu obiektów na obrazie jednocześnie. W tym wpisie skupiam się jedynie na kwestii wykrywania...
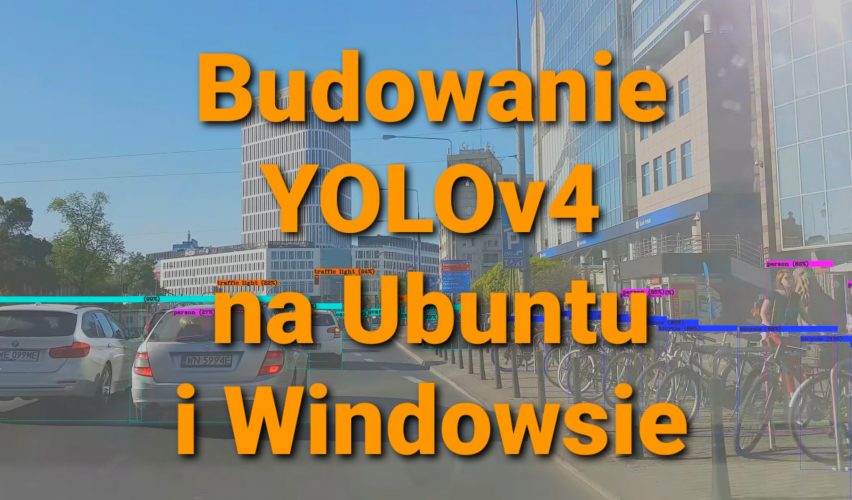
Jak zbudować YOLOv4 na Windowsie i Ubuntu?
Pokażę Ci jak prosto zbudujesz framework Darknet do algorytmu YOLOv4 na Ubuntu i Windowsie. Istnieje niezerowa szansa, że na innych Unixach Ci się także uda. Na Macu pewnie też, ale bez GPU, bo GPU było tam ostatnio w 2012 roku jakoś, chyba że działa Ci eGPU na USB, wtedy daj znać. Repozytorium:...
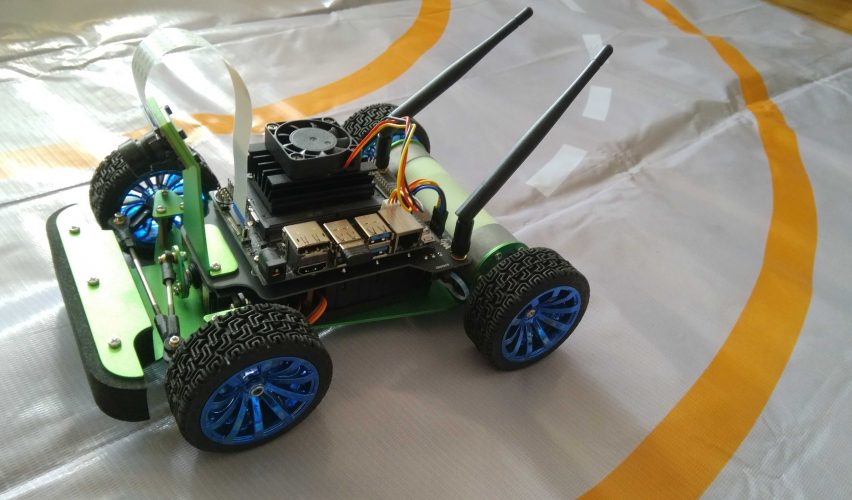
Składam Waveshare JetRacer (Part 2)
Witam,Tu Daniel i zapraszam do części drugiej overview na temat składania Jet Racer od firmy Waveshare. Instalacja Proces instalacji przeszedł bez większych problemów używając manuala ze stronki: https://www.waveshare.com/wiki/JetRacer_AI_Kit. Następnie wykonując kolejne kroki w sekcji ‘Guide of DonkeyCar’. Miałem kilka...
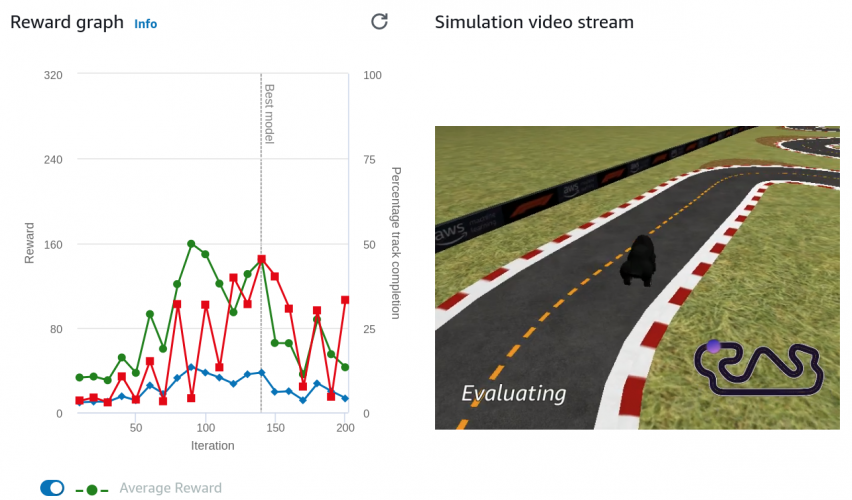
Jak zacząć z AWS DeepRacer w chmurze?
Szybko, bo do końca maja 2020 można korzystać z AWS DeepRacer za darmo***, w symulacji, w chmurze! Jeśli masz konto w AWS to całość uruchomisz w 15 minut, a pierwsze wyniki zobaczysz w pół godziny. Samochód jest sterowany przez sieć neuronową, do nauki której wykorzystywane jest uczenie nienadzorowane (Reinforcement...
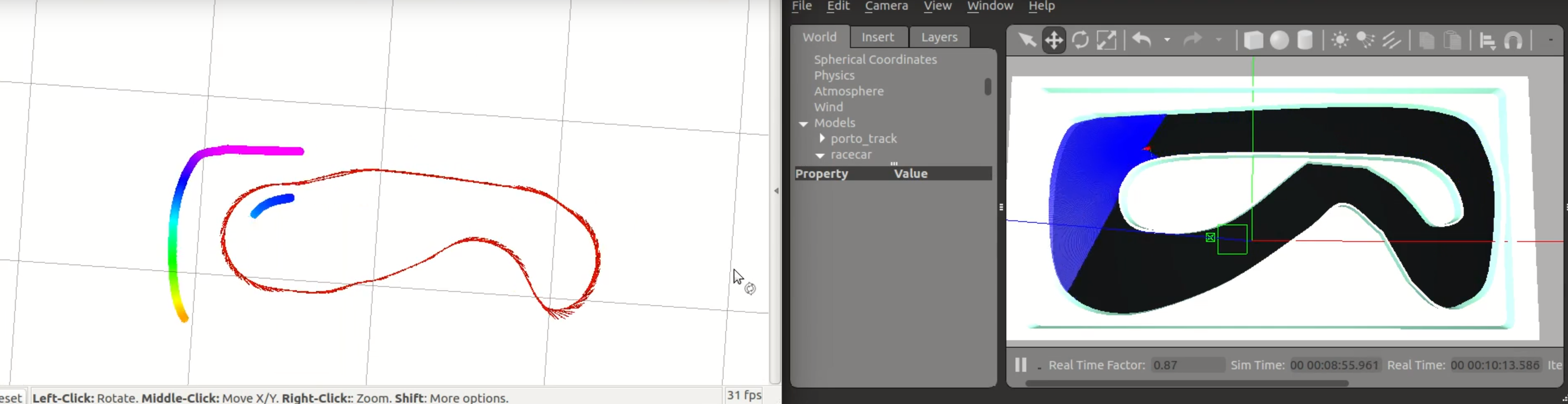
Jak uruchomić symulator F1/10 w Gazebo ROS
W tym poście dowiesz się jak zainstalować i uruchomić symulator F1tenth w Gazebo ROS. Pokażę Ci jak uruchomić symulator wraz z kodem, który jeździ po torze!...
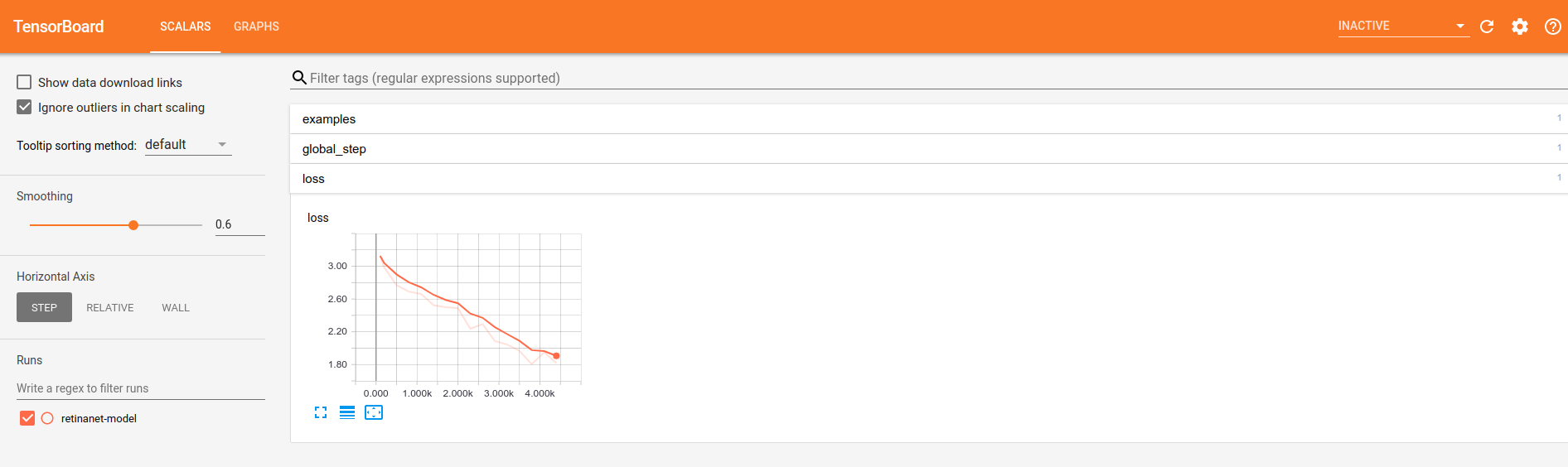
Pierwsze kroki z TPU
W tym poście pokażę Ci jak uruchomić pierwszy kod na TPU. Zaczynam od utworzenia TPU oraz serwera w Google Cloud, przygotowuję go do wykrywania obiektów, a następnie rozpoczynam pierwszy trening na TPU....
Jak zainstalować ROSa na Ubuntu 16.04
Chcesz zacząć swoją przygodę z ROSem (Robot Operating System), ale nie wiesz jak zainstalować ROSa na Ubuntu 16.04? Tutaj pokażę Ci jak to zrobić w bardzo prosty sposób!...